7. 自定义模型功能-目标检测¶
7.1. 代码¶
例程:
from mpython import *
from camera import *
import time
camera = CameraV831(tx=Pin.P16, rx=Pin.P15)
camera.model_yolo_init(["label1","label2","label3"],'/root/model/opt_int8.param','/root/model/opt_int8.bin',224,224,[4.069214876033057, 4.0495867768595035, 4.842875874125874, 4.626966783216783, 4.279592803030304, 4.3652935606060606, 5.198702830188679, 4.841686320754717, 4.55390625, 4.179166666666666])
while True:
camera.yolo_model.recognize()
if camera.yolo_model.id != None:
if camera.yolo_model.max_score >= 0.5:
print(camera.yolo_model.id)
print(camera.yolo_model.max_score)
print('')
time.sleep_ms(10)
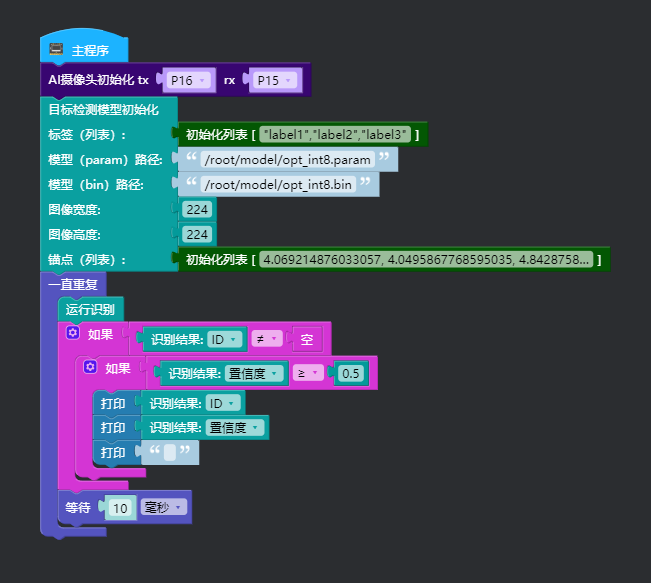
7.2. mPython图形化示例¶